Abstract Due to the existence of a redundant heel axis, the three-axis photoelectric tracking system can solve the tracking blind zone problem of the two-axis photoelectric tracking system and realize the full space tracking for the target. Aiming at the three-axis photoelectric tracking system of vehicle, based on the kinematics of the system, the kinematics model of the system is established, and a three-axis linkage full-space photoelectric tracking strategy based on hybrid optimization algorithm is proposed. Through the study of the kinematics model of the system, the relationship between the three-axis rotation angles is analyzed, so that the three-variable optimization problem of the three-axis angular incremental combination is simplified to solve the univariate optimal problem, and then the hybrid optimization algorithm is applied to obtain the optimal one. Triangular angular incremental combination. The simulation and experimental results show that the designed three-axis tracking strategy can obtain a smaller three-axis rotation angle increment combination, which can realize the three-axis linkage full-space continuous tracking motion of the on-board three-axis photoelectric tracking system, and improve the tracking performance of the system. With good practical application value.
This article refers to the address: http://
Due to its high time-frequency domain resolution, good anti-electromagnetic interference capability, superior night-time observation function and environmental adaptability, the photoelectric tracking system has a large field of low observability target detection and high-resolution target recognition. potential. At present, the photoelectric tracking system has been widely used in military applications such as precision guidance, fire control and aiming, and has received widespread attention. At the same time, with the continuous improvement of the requirements of the photoelectric tracking system, especially the mobility of the photoelectric tracking system, the photoelectric tracking system with the pedestal fixed to the earth can not meet the requirements of use. Therefore, the development of sports platform photoelectric tracking system has become the content of current research.
The two-axis photoelectric tracking system inevitably has a tracking dead zone. Because of the redundancy degree of the three-axis photoelectric tracking system, the tracking blind zone problem of the two-axis photoelectric tracking system can be avoided, and the blind space tracking in the whole space can be realized. However, the existence of redundant degrees of freedom in the system makes the measured value and spatial position of the three-axis photoelectric tracking system exhibit many-to-one characteristics, which determines the diversity and complexity of the tracking strategy. The existing three-axis tracking strategy mostly relies on the switching method. The essence is the combination of two different two-axis tracking strategies. Although the system is a three-axis structure, it fails to realize the three-axis linkage tracking, and the switching process will inevitably increase. Large system tracking error reduces system tracking accuracy and reliability.
There are also three-axis tracking strategies that are designed using optimization methods. The paper presents a three-axis tracking strategy based on particle swarm optimization. However, some of the tracking results are the same as the pitch-yaw two-axis tracking system, and the three-axis linkage tracking is not really realized. At the same time, the particle swarm is simply applied. The algorithm has the disadvantages of premature convergence and low efficiency of later iteration. Therefore, its optimized tracking strategy has a long optimization time and low practicability.
Based on the above reasons, this paper designs a vehicle-mounted three-axis photoelectric tracking system. At the same time, based on the analysis of the kinematics of the system, a fast hybrid optimization algorithm is proposed. The optimization algorithm is applied to the research of the three-axis linkage tracking strategy to obtain the triaxial angular increase that meets the tracking requirements when the target is at different positions. The combination of quantities and the effectiveness and practicability of this tracking strategy are verified by simulation experiments.
1 Analysis of kinematics characteristics of vehicle three-axis photoelectric tracking system
Figure 1 is a schematic diagram of an experimental device for a vehicle-mounted three-axis photoelectric tracking system. The working principle of the system is: the three-axis photoelectric tracking system is installed on the vehicle moving platform moving along the horizontal plane, and the position of the space target is measured by the target detector (CCD); then the rotation of the azimuth axis, the pitch axis and the heel axis is made. The aiming axis is aimed at the target to achieve the tracking function of the system.

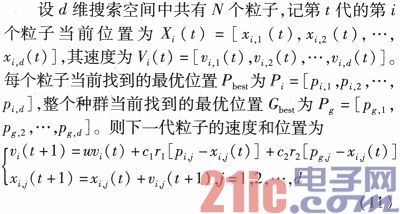
The rotational orientation of each rotating shaft of the three-axis photoelectric tracking system is shown in Fig. 2. Taking the geodetic coordinate system as the reference coordinate system, the origin is Oa, and the position of the vehicle platform is O. At a certain moment, the current translation coordinate of the vehicle platform is (m, n, 0) at the original coordinate position, and the rotation angle is α. Let the original coordinates of the target be (xa, ya, za), then the conversion relationship between the original coordinates (xa, ya, za) and the current vehicle platform coordinates (x, y, z) is
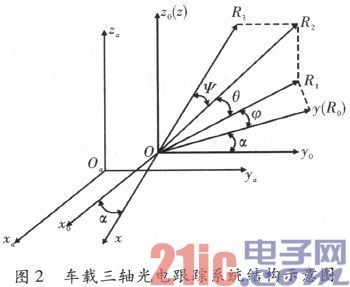
In the initial state, the system azimuth and heel axes coincide with the z-axis, the pitch axis coincides with the x-axis, and the aiming axis coincides with the y-axis. Let the distance between the target and O be yd. According to the quaternion definition, the zero aiming axis vector of the three-axis photoelectric tracking system in the reference coordinate system is R0=ydj. First, the angle of rotation around the azimuth axis is φ, the aiming axis vector R1 is obtained, and the quaternion of the rotation is q1; the angle of rotation around the pitch axis is θ, the aiming axis vector R2 is obtained, and the quaternion describing the rotation is q2; The angle of rotation of the heel axis is ψ, the aiming axis vector R3 is obtained, and the quaternion describing the rotation is q3, wherein

For the three-axis photoelectric tracking system, the target original position ra(xa, ya, za) can be obtained by the target detector, and converted to the current position r(x, y, z) by the equation (1), and the system's triaxial initial The rotation angle (φ, θ, ψ) is a measurable value. Therefore, in order to aim the three-axis photoelectric tracking system at the target current position r, the three-axis execution angle of the three-axis photoelectric tracking system can be completed by three angular position increments (Δφ, Δθ, Δψ), and the relationship is as follows (4) ) shown.
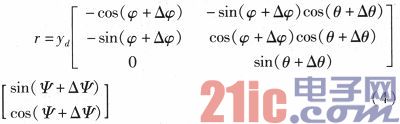
It can be seen from the analysis that equation (4) is a redundant equation. Therefore, in the three-axis photoelectric tracking system, due to the existence of the redundant heald axis, when the pointing position and the target position before and after the rotation are known, the combination of the rotation angles of the triaxial angular increment can be infinite, and thus optimization must be adopted. The method is to solve for the optimal combination of three-axis corner increments.
Since the ultimate goal of the three-axis photoelectric tracking system is to align the aiming axis of the system with the tracking target, in order to enable the three-axis photoelectric tracking system to track the target in the shortest time, the optimization target is set to
minJ0=|△φ|+|△θ|+|△ψ| (5)
The process of finding the three-axis angular position increment (△φ, △ θ, △ ψ) is a three-variable optimization problem. Since equation (4) is a redundant equation, according to equation (4), the other two angular increments Δφ and Δψ can be expressed by the angular increment Δθ, as shown in equations (6) and (7), respectively. Show.

In equation (7)
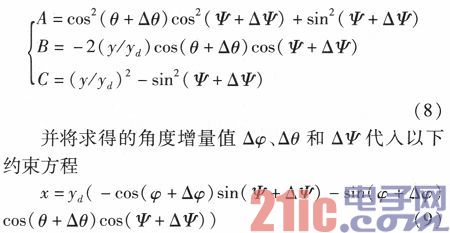
The angular increment value that does not satisfy the formula (9) is rounded off and substituted into the equation (5) to obtain a triaxial angular increment combination that satisfies the requirements.
Under the premise of satisfying the alignment target, combining the equations (6), (7) and (9), the optimization target shown in equation (5) is transformed into a function represented by Δθ.
minJ(△θ)=|△φ(△θ)|+|△θ|+|△ψ(△θ)| (10)
Through the above method, the three-variable optimization problem is simplified to the single-variable optimization problem, which can simplify the optimization steps of the algorithm, shorten the optimization process of the algorithm, and improve the rapidity of the optimization algorithm.
2 Vehicle-based three-axis linkage tracking strategy based on hybrid optimization
2.1 Hybrid Optimization Algorithm
The PSO algorithm is an iterative-based intelligent optimization tool. Its algorithm has fast convergence, good robustness and versatility, and is especially suitable for engineering applications. However, the PSO algorithm has premature convergence, and the later iteration efficiency is not high. Therefore, for the above shortcomings of PSO algorithm, the PSO algorithm is adaptively improved, and the crossover and mutation ideas in genetic algorithm are introduced. A hybrid optimization algorithm is proposed to improve the global search ability of the algorithm, prevent premature convergence and improve the algorithm. Optimize performance.
Where w is the inertia weight factor; c1 and c2 are positive learning factors; r1 and r2 are uniformly distributed random numbers between [0, 1].
The improved algorithm is described as follows:
(1) By reducing the nonlinearity of the inertia weight factor w to improve the convergence performance of the algorithm, the expression is as follows
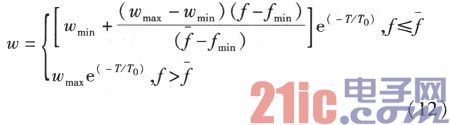
Where wmax and wmin are the maximum and minimum values ​​of w, respectively; f is the current target value of the particle; ![]() And fmin are the average target value and the optimal target value of all current particles, respectively, T is the current number of iterations, and T0 is the total number of iterations.
And fmin are the average target value and the optimal target value of all current particles, respectively, T is the current number of iterations, and T0 is the total number of iterations.
It can be seen from equation (12) that the inertia weight factor w decreases with the increase of the number of iterations. Therefore, the algorithm has a large search range in the early stage, and the global search ability is strong. The algorithm has high efficiency and fast convergence. Moreover, when the target values ​​of the particles tend to be consistent or tend to be locally optimal, the inertia weight is increased, the search range is increased, and the global search ability is improved; when the target values ​​of the particles are relatively dispersed, the inertia weight is decreased. . At the same time, for the target whose target value is better than the average target value, the corresponding inertia weight factor is small, thus protecting the particle; otherwise, for the particle whose target target value is worse than the average target value, the corresponding inertia weight factor is larger. The particles are brought closer to a better search interval.
(2) For learning factors c1 and c2, when c1 is larger, the particles have greater self-learning ability; when c2 is larger, the particles have greater social learning ability. Therefore, its expression is as follows
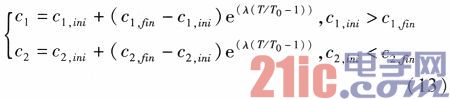
Where c1,ini and c2,ini are the initial values ​​of c1 and c2, respectively; c1,fin and c2,fin are the iterative final values ​​of c1 and c2, respectively; T is the current number of iterations; T0 is the total number of iterations; λ is given Set the parameters.
It can be seen from equation (13) that in the initial stage of optimization, particles have greater self-learning ability and less social learning ability, which enhances the global search ability; in the later stage of optimization, particles have smaller self-learning ability and larger The social learning ability is conducive to convergence to the global optimal solution.
(3) The particles whose target value is better than the average target value remain unchanged to protect the excellent particles; at the same time, the crossover and mutation operations are performed for the particles whose target value is inferior to the average target value, and the specific steps are as follows.
Cross: For a particle whose target value is inferior to the average target value, it intersects with the global optimal particle Gbest, and the particle with the best target value of the child replaces the current particle. Its crossover probability is

Where f is the current target value of the particle; and fmax is the average target value and the worst target value of all current particles respectively; Pcmax and Pcmin are the upper and lower limits of the crossover probability, respectively; μ is a set constant.
Variation: For particles with a target value that is inferior to the average target value, the mutation is performed. The probability of variation is
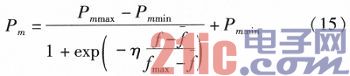
Where f is the current target value of the particle; f and fmax are the average target value and the worst target value of all current particles; Pmmax and Pmmin are the upper and lower limits of the mutation probability respectively; η is the set constant.
It can be seen from the equations (14) and (15) that the worse the target value of the particle, the greater the probability of crossover and the probability of mutation. Therefore, through the above crossover and mutation operations, not only can the diversity of the population be improved, the convergence speed of the algorithm can be accelerated, and the premature convergence can be avoided, and the global search ability of the algorithm can be improved.
2.2 Three-axis hybrid optimization strategy
The hybrid optimization algorithm is applied to solve the optimization problem of the three-axis angular increment combination of equation (10). The algorithm flow is as follows.
Step1 randomly initializes the position and velocity of the particle Δθ, calculates different J values ​​corresponding to different Δθ, sets Pbest of the particle Δθ to the current position, and sets Gbest to the Δθ value corresponding to the minimum J value in the initial population.
Step 2 performs operations for all particles Δθ: (1) Update the position and velocity of the particles according to the equations (11) to (13). (2) Calculate the target value J corresponding to each particle Δθ, and update the individual optimal position Pbest and the group optimal position Gbest.
Step 3 keeps the particles whose target value is better than the average target value. For the particles whose target value is worse than the average target value, perform the crossover and mutation operations: (1) cross the global optimal particle Gbest according to formula (14). The particles with the best target value are replaced by the current particles. (2) The mutation operation is performed according to the equation (15). (3) Calculate the target value J corresponding to each particle Δθ, and update the individual optimal position Pbest and the group optimal position Gbest.
Step 4 determines whether the convergence criterion of the algorithm satisfies the formula (10). If yes, execute Step 5; otherwise, go to Step 2.
Step 5 outputs the global optimal position Gbest and the corresponding minJ, and the algorithm runs.
3 Experimental data and analysis
Under the condition that the tracking accuracy is certain, the tracking performance of the photoelectric tracking system is mainly determined by two aspects: (1) the size of the tracking range. The larger the tracking range, the better the tracking performance of the system. (2) The magnitude of the rotation angle increment of each axis. Under the condition that the rotation speed of each axis is the same, the smaller the rotation angle increment, the shorter the time required to achieve the target tracking, the better the tracking speed of the system, and the better the tracking performance of the system.
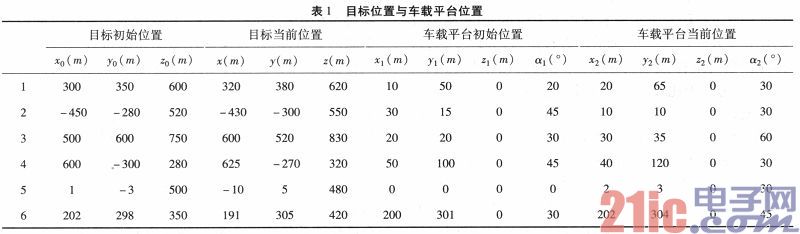
Firstly, in order to test the optimization performance of the vehicle-based three-axis tracking strategy based on the hybrid optimization algorithm, the hybrid optimization algorithm is applied to the three-axis angular increment combination for 100 times to optimize the target position and the vehicle platform position in Table 1. The number of iterations verifies the fastness of the algorithm. Only the number of optimization iterations and the average optimization result obtained for the first group in Table 1 are given here. Among them, the parameters of the hybrid optimization algorithm are set as follows
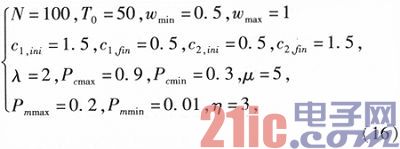
Figure 3(a) shows the average iteration curve of the sum of the triaxial angles of 100 times of optimization, and Fig. 3(b) shows the number of different iterations of 100 times of optimization. As shown in Figure 3, applying the hybrid optimization tracking strategy, by converting the triaxial angular incremental optimization problem into a one-dimensional univariate optimization problem, the average only needs

Therefore, the optimization process is simple, the optimization time is short, and the algorithm is fast.
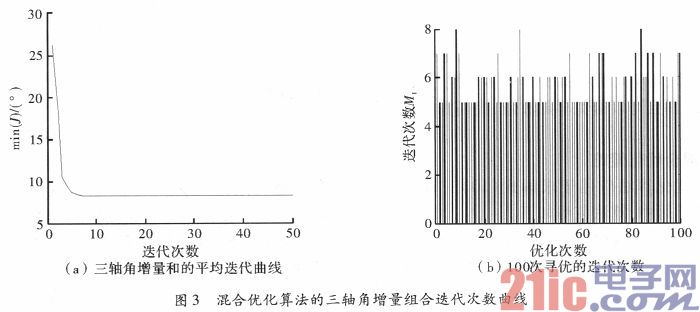
Table 2 shows the tracking results of the vehicle-based three-axis tracking strategy based on hybrid optimization and the tracking results of the corresponding on-board two-axis strategy. From the comparison of the two tracking results in Table 2, the following conclusions can be drawn:
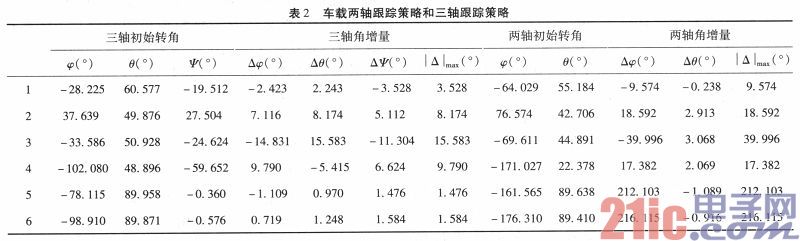
(1) The azimuth increment of the vehicle two-axis photoelectric tracking system near the zenith (the data of the 5th and 6th groups) is obviously too large, and the tracking of the target cannot be achieved, and the system enters the tracking blind zone. Therefore, the on-board two-axis photoelectric tracking system has the smallest tracking range.
(2) The vehicle-mounted three-axis photoelectric tracking system using the hybrid optimization tracking strategy can not only achieve target tracking with a small rotation angle increment near the zenith, thus avoiding the generation of the zenith blind zone; Compared with the strategy, the vehicle-mounted three-axis photoelectric tracking system based on the hybrid optimization tracking strategy has the minimum value of the rotation angle increment |Δ|max, so that a smaller angular increment combination can be obtained, and the time required for the system tracking process is more Short, able to achieve target tracking and tracking faster, tracking performance is best.
In order to verify the effectiveness of the hybrid three-axis photoelectric tracking strategy based on hybrid optimization, the continuous tracking motion of the vehicle three-axis photoelectric tracking system is considered. The experimental device of the vehicle three-axis photoelectric tracking system is shown in Figure 1. According to the relevant parameters of the experimental device, the maximum speed of each axis of the system is v=57.3°/s; the sampling frequency of the target detector is 10 Hz, and the sampling of the three axes is sampled. The frequency is 50 Hz. For ease of comparison, consider the tracking trajectory when the target is over the top. At the initial moment, the aiming axis of the photoelectric tracking system is facing the target, and the target is linearly moved to [-360, 600, 1 800]T by [3 000, -1 800, 600]T through T0=12 s. [100,100,0]T linearly moves to [220,220,0]T at a constant speed of T0=12 s, and the rotation angle is changed from 20° to 30°. It can be seen that when t=10 s, the target position is [200,200,1600]T, and the position of the vehicle platform is [200,200,0]T, at which time the target passes the zenith position of the vehicle platform.
In order to prevent the number of occasional iterations in the optimization process from being too large, and to avoid the optimization time being too long, the maximum number of iterations per optimization is set to 15 according to the actual test experience; when the number of iterations in the optimization process is >15 , stop iteration, and select the current optimal angular increment combination as the final optimization result.
According to the analysis, for the on-board two-axis photoelectric tracking system, when the target reaches the zenith position of the vehicle platform (t=10 s), the azimuth rotation speed is infinite, and the power of the driving motor cannot meet the requirements of system tracking, resulting in the target. Lost, the system enters the tracking dead zone. The vehicle-mounted three-axis photoelectric tracking system using the switching strategy can avoid the zenith blind zone by the motion switching of the azimuth axis and the heel axis; however, the switching process makes the system tracking process discontinuous, which not only increases the complexity of the system motion control strategy. In order to ensure that the target can still be tracked during the motion switching process, the azimuth axis speed needs to be immediately zero near the zenith, and the heel axis immediately reaches the desired speed from rest. Obviously, this is not realized in the actual system, and thus inevitably increases the tracking error of the system during the switching process, reduces the tracking accuracy and reliability of the system, and even causes the system to lose the target during the handover process.
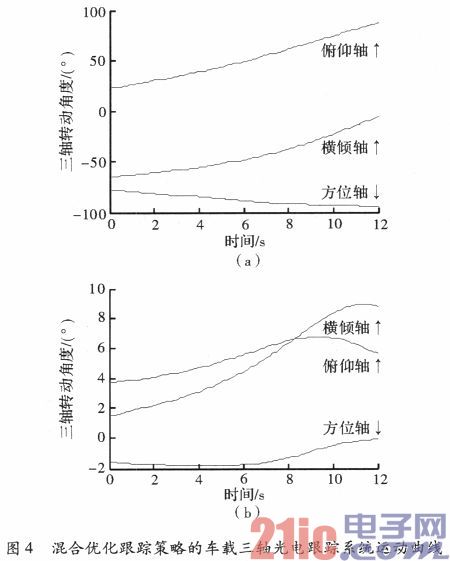
Figure 4 shows the tracking motion curve of a vehicle-mounted three-axis photoelectric tracking system based on a hybrid optimized tracking strategy. It can be seen from Fig. 4 that the on-board three-axis photoelectric tracking system based on the hybrid optimization tracking strategy, during the entire tracking motion, the three-axis rotational speed required by the system is much smaller than the maximum rotational speed given by the system, thus making the three-axis The tracking and positioning of the target can be realized by rotating a relatively small angle respectively, which ensures the real-time and rapidity of the system tracking process. Moreover, the system can avoid the generation of the tracking blind zone and realize the continuous tracking and positioning of the target in full space. The tracking performance is better than the two-axis tracking strategy. At the same time, the motion switching between the axes is not needed during the tracking process, which avoids the tracking process discontinuity caused by the switching, and the tracking error generated during the switching process increases. Tracking accuracy and reliability are reduced, so its tracking performance is better than the three-axis switching tracking strategy. Therefore, the tracking error of the system during the whole control motion is small, the tracking precision is high, and the tracking stability is good, which can meet the requirements of the vehicle three-axis photoelectric tracking system for target tracking. Therefore, the vehicle-mounted three-axis photoelectric tracking system based on the hybrid optimization tracking strategy can truly realize the three-axis continuous-space continuous tracking motion with good tracking performance.
4 Conclusion
In this paper, the quaternion method is used to analyze the kinematics of the three-axis photoelectric tracking system, and the relationship between the three-axis angle and the target azimuth coordinates is given. Then, a hybrid optimization algorithm is proposed and applied to the study of three-axis linkage full-space continuous tracking strategy, and the optimal triaxial angular increment combination that satisfies the tracking requirements at different target positions is obtained. The simulation and experimental results show that the vehicle-mounted three-axis photoelectric tracking system with hybrid optimization tracking strategy can eliminate the tracking blind zone and achieve the full-space tracking motion of the target. Moreover, the system does not need to perform the motion switching between the axes during the tracking process. The continuous tracking motion of the target reduces the complexity of the system motion control strategy, avoids the tracking error increase and the tracking accuracy reduction caused by the switching process. At the same time, the system can have a smaller rotation axis angle during the tracking process. Incremental tracking of the target is achieved, thus enabling tracking and positioning of the target in a shorter time. Therefore, applying the hybrid optimization tracking strategy can truly realize the three-axis coordinated full-space continuous tracking motion of the on-board three-axis photoelectric tracking system, and improve the tracking performance of the system. Its tracking performance is better than the existing two-axis and three-axis switching tracking. Strategy, with good engineering practicality.
C7/C9 Light Bulb LED Filament COB technology provides amazing illumination. The LED
filament bulb tough polystyrene construction provides super bright and
shatterproof.Liven up your light display for the holidays with these
luxury bulbs! Install these Bulbs into screw base
fixtures directly. Unlike fluorescent bulbs, these bulbs are free of UV
and mercury.
C7/C9 Light Bulb
Pink Led Bulb,Colored Light Bulb,E12 Replacement Bulb,Purple Light Bulb
DONGGUAN JIANXING LIGHTING ELECTRIC APPLIANCES CO., LTD , https://www.rslightstring.com